GTrans Home Page
GTrans stands for Goal TRANSformation.
Mixed-initiative planning combines human and machine problem solving processes so that the results are better than either can achieve alone. It is an interactive planning process in which, both humans and automated planners actively collaborate in the construction of plans. GTrans is mixed-initiative planning system that presents tasks to the user as a goal manipulation problems rather than a problem of search.
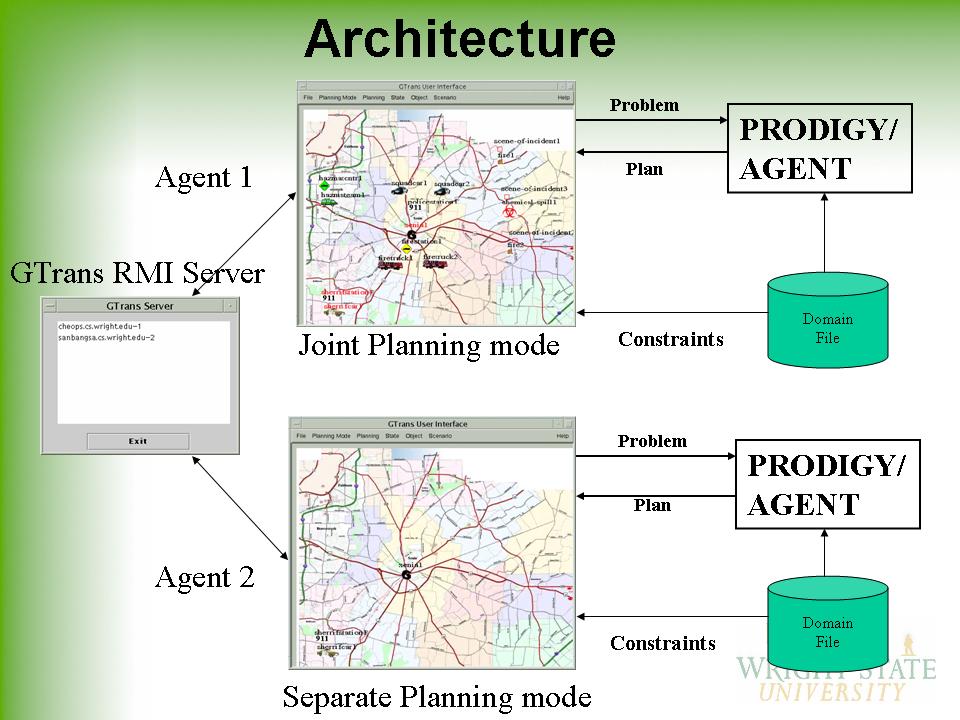
GTrans hides the planning algorithms and representations from the human planner while focusing on the goal manipulation process. It provides the user with a mechanism to directly manipulate the set of objects and initial state of the planning world, as well as the objectives of the planning problem. The user is able to define the objectives or goals and to assign particular resources to achieve these goals. When the underlying planner fails to generate a plan because of insufficient resources or because the planning world evolves, the user can asynchronously modify the goals and send them back to the planner for another round of planning, thus steering the planning process. The GUI is suitable mainly for spatial domains.
![]()
![]()
![]()
![]()

![]()
![]()
![]()
The PRODIGY (Carbonell et al., 1992; Veloso et al.,1995) planner demonstrates an important step towards goal transformations performed by a machine. During the planning process, PRODIGY keeps track of the changes in the real world through rationale-based planning monitors (Veloso, Pollack, & Cox, 1998). They monitor the real world and inform the planner whenever there is a change. PRODIGY then transforms goals appropriately to adapt to the new state of the world. This worked well but had no means of evaluating its performance and effectiveness. To compare the goal transformations made by a machine to that made by a human, it was necessary to develop a system where a human can make these changes. GTrans (Cox, 2000; Cox, Kerkez, Srinivas, Edwin, & Archer, 2000; Cox & Zhang, 2004; Zhang, 2002; Zhang, Cox, & Immaneni, 2002; Immaneni & Cox, 2004;) is such a system. GTrans works with the PRODIGY planner and allows a human to make goal transformations.
GTrans Version 2.1: User manual and reference
K2-GTrans integration videoDemo (This demo will need the TSCC codec from techsmith.com)
Another version of this page can be found here.
Some images:
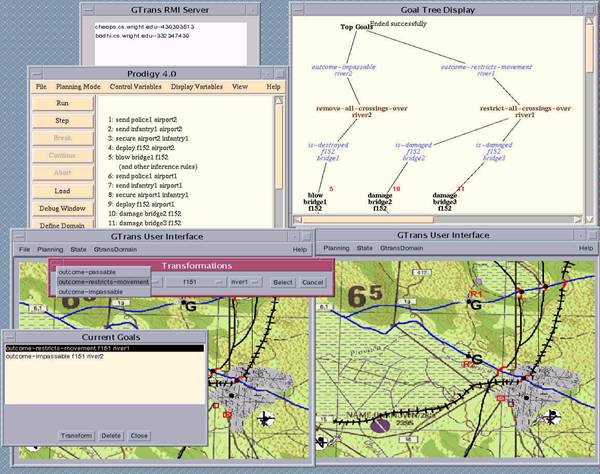
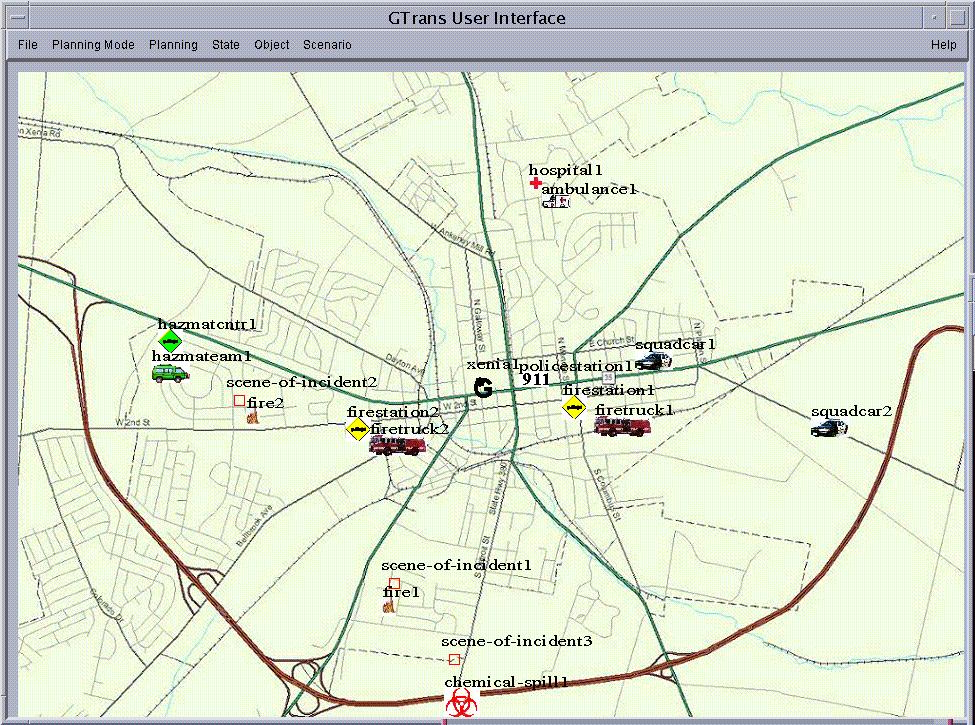
A screen shot from the emergency response domain:
An example plan:
Note: CSMT = Chemical Spill Management Team = Hazmat
GTrans Architecture: